The development of human symbiotic robots that can support human daily activities is greatly expected to be a measure against labor shortages in aging societies. The human symbiotic robots are required to have the functions of human friendly communication, human safety assistance and dexterous manipulation. However most of the conventional robotics researches have focused on the entertainment application or the technology of biped humanoid robots, and there is few studies on the design and control of human symbiotic robots. Because the basic technologies for “Safety”, “Dependability” and “Dexterity” is very difficult to develop.
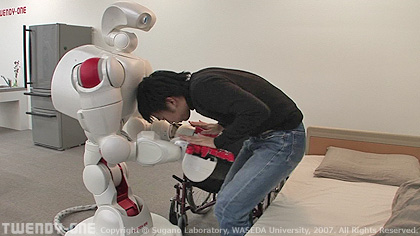
TWENDY-ONE is a sophisticated human-symbiotic-robot which equips all the functions described above. The special feature of TWENDY-ONE is the combination function of the dexterity with passivity and the high-power output. TWENDY-ONE equips high output actuators with the simple mechanical passive impedance mechanism. When TWENDY-ONE manipulates an object with various shape, it is easy for TWENDY-ONE to adapt to the object by passivity to absorb external force generated by the positioning deviation. In the same way, TWENDY-ONE can adapt to human motion and hold a human. As a result, TWENDY-ONE can manipulate an object dexterously as well as support a human.