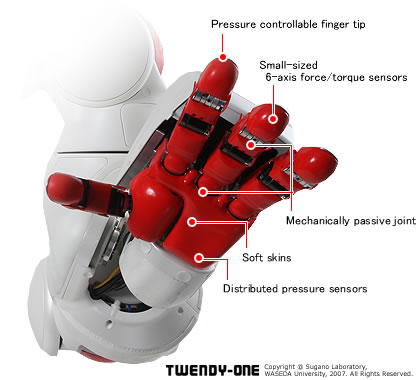
The hand of TWENDY-ONE is designed similar to that of human to realize dexterous manipulation stably. It is a human mimetic design approach and we call it “Bio-mechanism Design”. Though the number of fingers is four, the design (link, degrees of freedom) of TWENDY-ONE fingers is almost same as that of human fingers. The finger tip is made of soft material and it has human like gentle curved surface with a nail. In the finger tip, a six-axis force sensor and distributed force sensors are installed. Thanks to these characteristics, the TWENDY-ONE hand can grasp various objects such as soft plastic or paper cup stably and manipulate the small object such as a straw or a pencil freely. In addition, the passive compliance mechanism is introduced to the finger joint and it enable the robot to adapt to various shapes of the objects robustly.
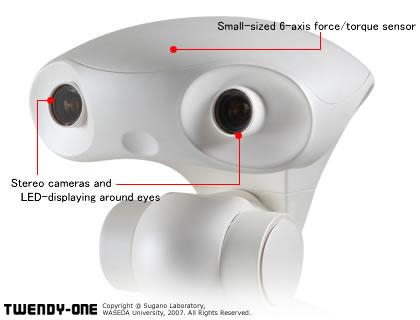
The head part of TWENDY-ONE has three degrees of freedom: Roll, Pitch and Tilt. Tilting the head to one side is an effective motion to express a kind of intention such as question or not-understanding.
Two CCD cameras surrounded by LEDs, a speaker, and a six-axis force sensor are installed on the head part. The illumination of the LEDs can show the condition of the vision system. The force sensor can detect the human touch to the head of the robot.